Sure! Could you upload your Quality Report to our OneDrive here? We’ll analyse your results, detect problems and give you the best practices for processing your datasets.
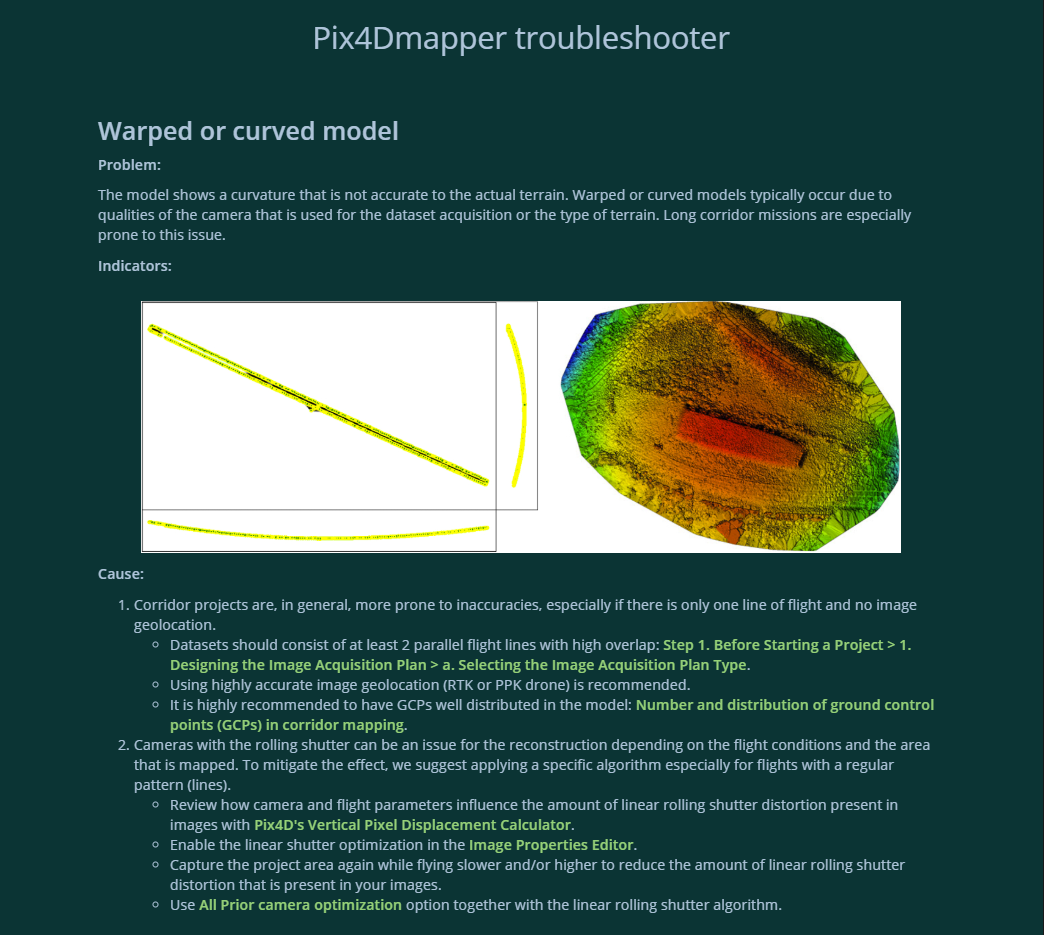
Thank you for sharing your Quality Report with us. To learn more about that effect, please have a look at our explanation in the Pix4Dmapper troubleshooter.
This error can indeed be eliminated by marking GCPs in the project. However, this additional source of information isn’t always available. In that case, changing the processing options would be a workaround. In your dataset, the “bowl effect” doesn’t exist or is not visible much (maybe in the rayCloud is more noticeable). Nevertheless, the overlap between images isn’t sufficient; hence, the software couldn’t have computed many matches. Therefore there’re some issues we can improve by applying another processing options which at the same time can fix the “bowl effect” if present. I advise you to process your dataset one more time and include the following changes:
Thank you very much for your help. I uploaded to the link the second report. Actually, this is the important one, I made a flight at 66 meters of altitude but I got some uncalibrated cameras. I tried all the initial processing options in order to improve the keypoints matching but I still got some uncalibrated cameras (2%). I included some images taken at 120 meters of altitude and it helped a little bit (however, it reduced the GSD in 0.02 cm, not a big problem).
Could you please check this report and let me know about the ‘bowl effect’, and how you recognize it. Remember I did not use GCPs.
Did you try to reprocess your dataset with larger image scale? Half image size 1/2, for example? Remind the rest of the options in Step 1.
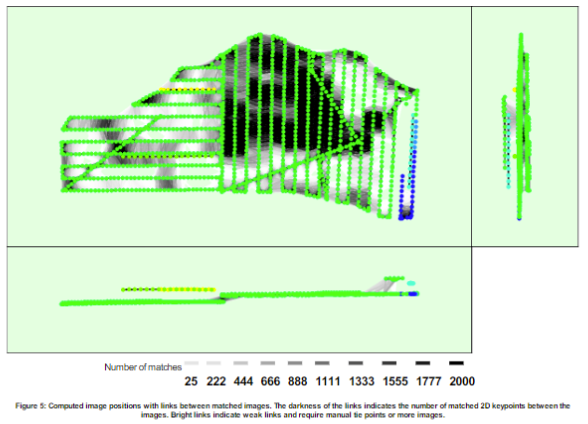
Because of the fact the area, you are trying to reconstruct is covered by forest with lots of vegetations the software has problems finding matches between images. The larger scale should help overcome this issue. That is also the reason why 6 separate blocks are detected. The dataset is smashed. Therefore, the reconstructions won’t be all-encompassing with the highest quality.
I would also advise you to take a subset of your data where most of the problems occur and reprocess them separately. I believe you can find the right processing options for those images.
These cookies are necessary for the website to function and cannot be switched off in our systems.
They are usually only set in response to actions made by you which amount to a request for services, such as setting your privacy preferences,
logging in, or filling in forms. These cookies do not store any personally identifiable information.
These cookies allow us to count visits and traffic sources so we can measure and improve the performance of our site.
They help us to know which pages are the most and least popular and see how visitors move around the site.
All information these cookies collect is aggregated and therefore anonymous.
If you do not allow these cookies we will not know when you have visited our site, and will not be able to monitor its performance.
These cookies may be set through our site by our advertising partner (Google).
They may be used by Google to build a profile of your interests and show you relevant adverts on other sites.
They do not directly store personal information but are based on uniquely identifying your browser and internet device.
If you do not allow these cookies, you will experience less targeted advertising.