Does anyone use software for 3D stereo-pairs feature extraction and editing (like ERDAS Imagine or DATEM Summit Evolution)? Would appreciate info on how it works.
Hi. Yes, we are using Datem Summit Evolution. We imported the data from pix4D to Summit EV with success.
After generating stereo pairs we are able to see stereo but after a manually control measurement of any gps measured ground control points,
we got a 0,33m difference in Z. It seems that the parameters coming from Pix4D for the camera orientation and or the mtpss and gcps are not enough or different to the parameteres coming from Match AT or other triangulation softwares. The Datem support wrote, “We see problems like this somewhat often in Pix4D projects”
It would be very helpfull to have a @support from @Pix4D here to solve problems or improve data before export.
We used to fly the DJI Mavic 2 Pro with Hasselblad camera
Flight High: 60m
The project was generated with very good results (RMSE: 0,005) in pix4D, but not useable in Summit EV
Here is a link to the project i am talking about:
https://cloud.pix4d.com/pro/project/515089/map?shareToken=86f0c83a-7bf0-4aaa-9551-d6361ccd47bc
Here any screenshots from project and report:





Hello Christian,
Would you describe how you are importing/opening the project in Summit Evolution?
What images are you using? the original ones or the undistorted ones?
How are you defining the camera in Summit Evolution? Would you send a snapshot?
There are some things to consider:
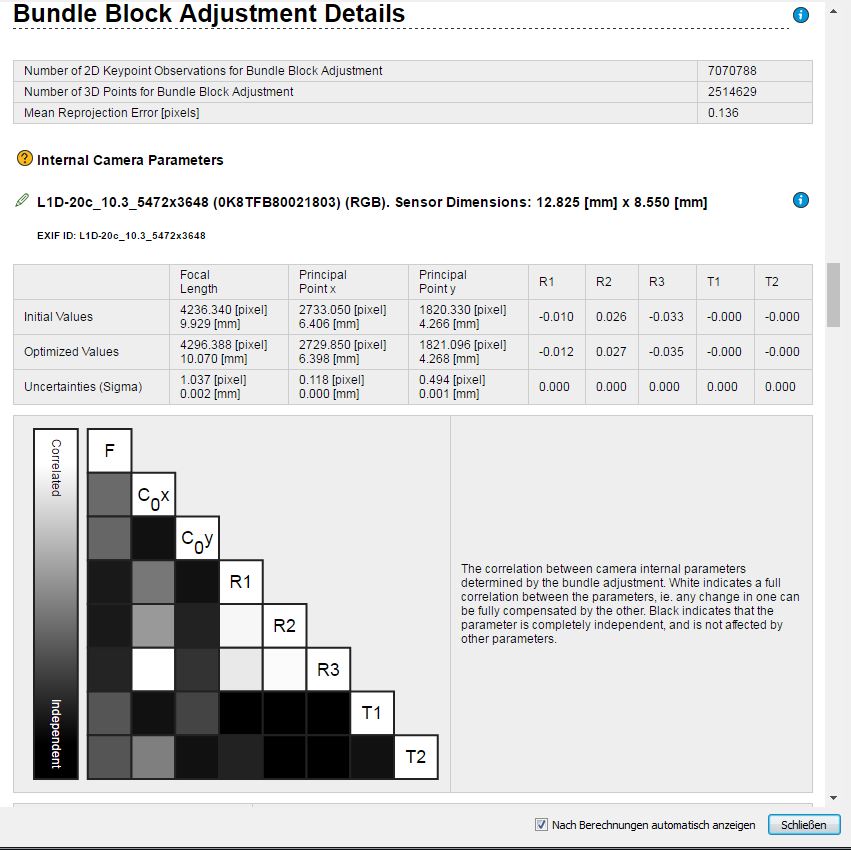
- The distortion parameters are different. I mean that the K1,K2… parameters do not probably correspond to the same formulas in Summit and Pix4D.
- Pix4D is able to generate the undistorted images and I would recommend to use them for the stereo in Summit so no distortion parameters need to be defined.
I would suggest:
- Generate the undistorted images
- Create the Summit project but in the camera definition, type only dimensions, focal length and principal point.
- Use the undistorted images instead of original ones.
Please let me know how it goes.
Thank you very much.
Hi Daniel,
we generated and used the undistorted images.
the camera was imported from the Pix4D project.
I have also made a description for the Datem support team, but due to german support in german language.
Maybe the screenshots will help. (Sorry did`nt find a possibility to upload the complete *.doc File)

The Pix4D project was uploaded to your cloud, feel free to check out the results:
https://cloud.pix4d.com/pro/project/515089?shareToken=86f0c83a-7bf0-4aaa-9551-d6361ccd47bc
Had recently the same problem. Did Pix4D went further in export to Summit Evolution?