Hello everyone!
Here I present my case. This is a 5 km road which has been scanned using Zenmse P1 Camera, with 90% overlap, 8m/s speed and Nadir angle.
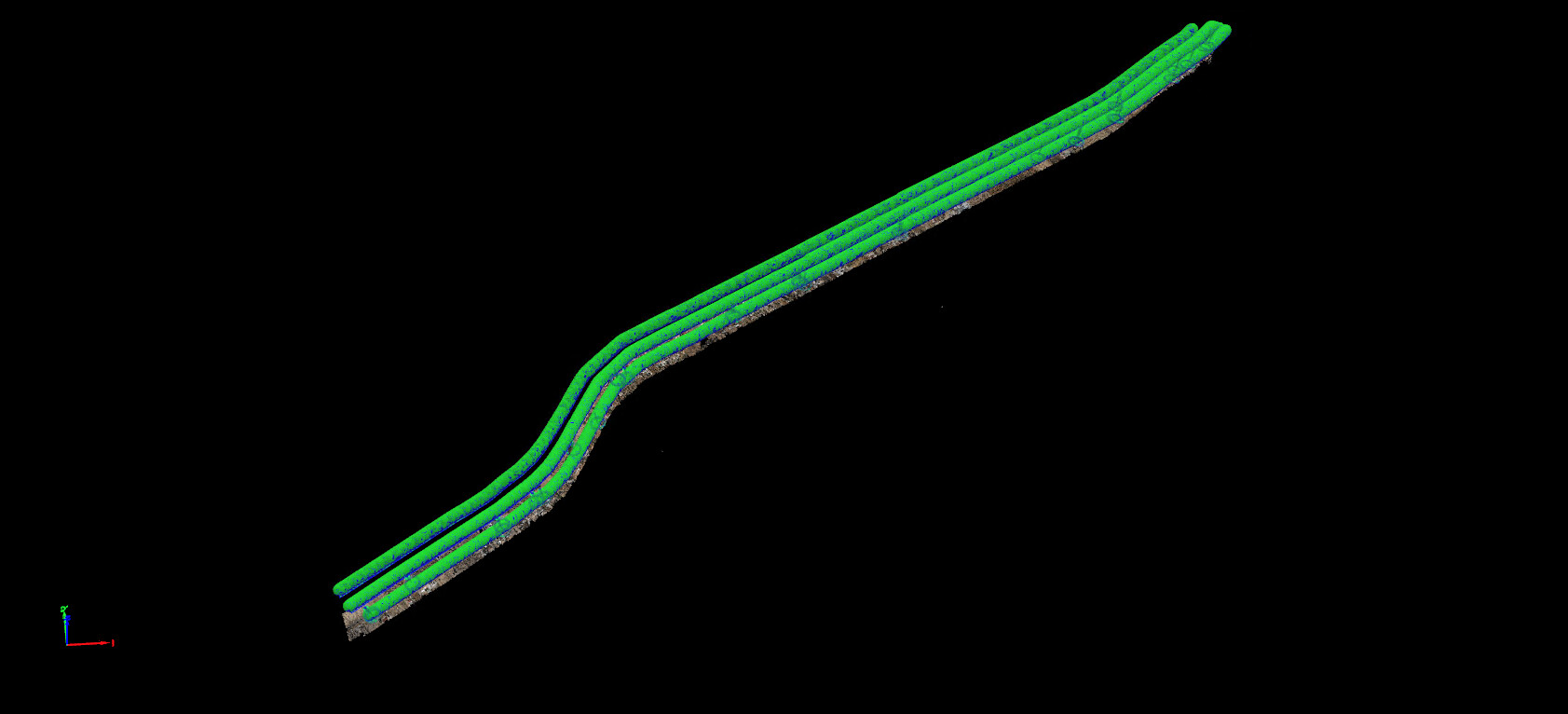
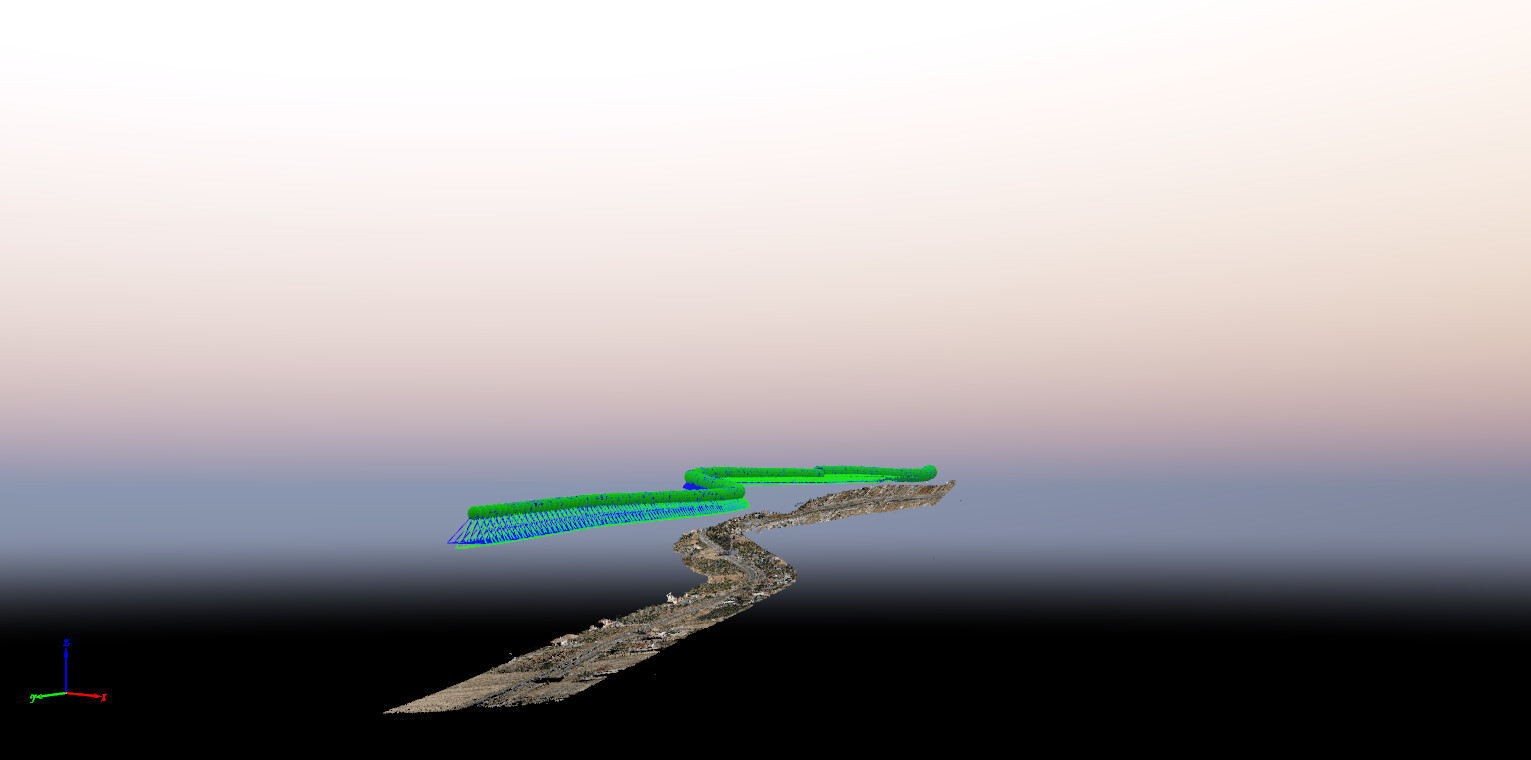
After running STEP 1, the output is VERY extrange. The flight began in the south of the road and the first meters are OK, but after some distance, the road starts to be twisted ending in almost complete vertical position. You can clearly see how PIX4D does not respect the orientation of the camera, despite the internal parameters have been selected as “All prior”.
See pictures atteched for better understanding.


How is it possible that the software deviates so much the angles of the camera from the original internal data. I can confirm that all pictures all well georreferenced and EXIF data contain the correct angles.
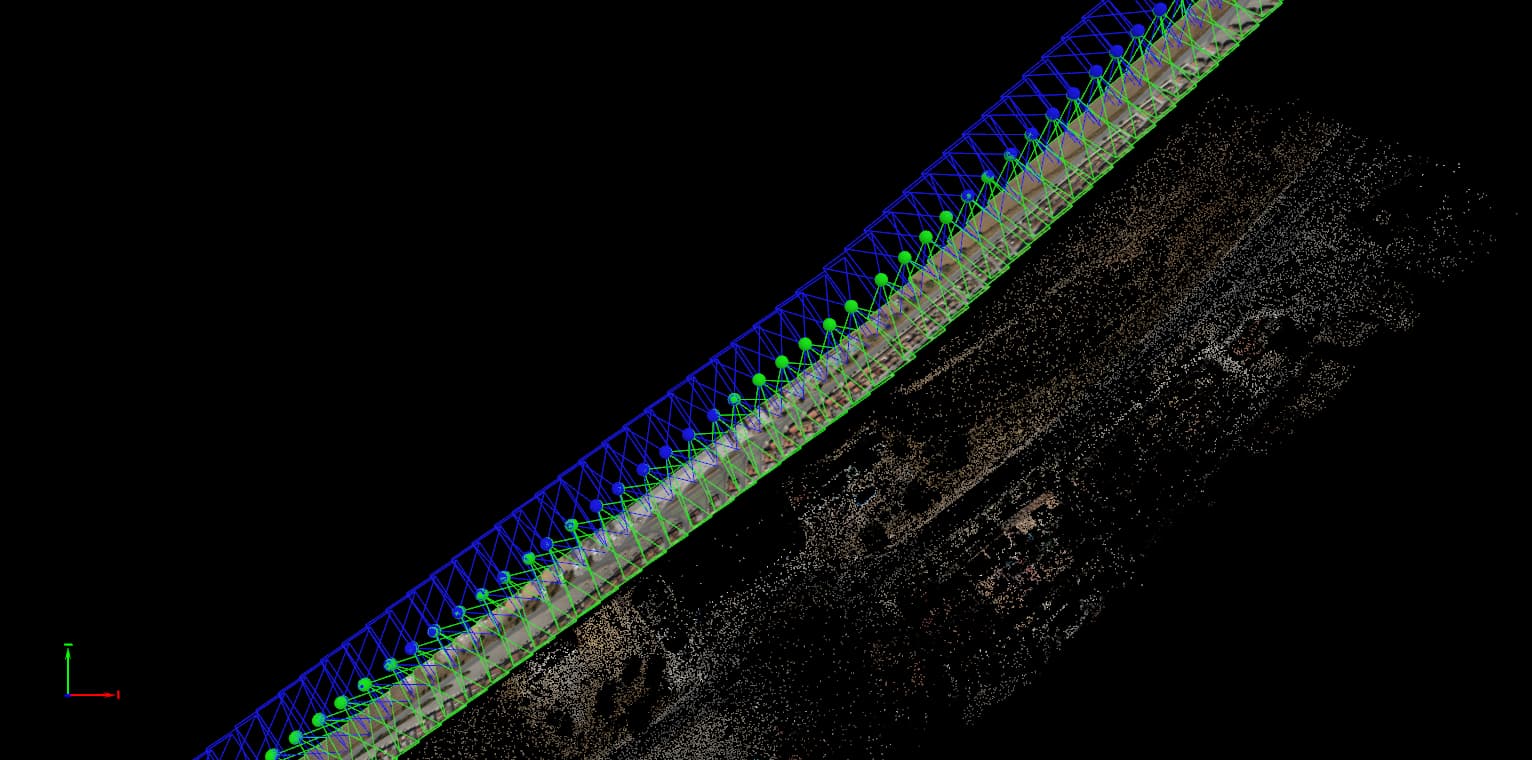
Furthermore, the project includes GCP points which I loaded into the project after running STEP 1. As expected those GCPs deviate quite a lot from the Point Cloud (or the other way around, the STEP 1 Point Cloud is quite off from where it should be).
To “help” the project to find the right 3D position I have manually created some 3D points giving those points the correct GPS coordinates. After reoptimizing the project, how is it possible that PIX4D keeps saying there is a difference between the correct position and the position calculated by itself? See picture below.

There must be something that is priorising the calculated position above the real GCP position. But I don’t find what it is.
Any ideas?
Thanks everyone in advance.