Hello everybody,
I put Matic to a demanding trial by processing 1700 images captured with a phone and viDoc RTK.
The object is in a park, a circular pavillon supported by columns.
The mesh i published her: Paviljong_2023-05-25 - 3D model by tbg-tva [e6cd178] - Sketchfab
I wonder how could I improve the modell ? May be with some MTP’s ?
–
regards
Tibor
Hi Tibor,
I have a few questions as it is hard to give any suggestion with limited data.
-
Is is possible to share the full project data/images?
-
What settings were selected in PIX4Dmatic?
-
Were all the images captured at once in one large capture, or are we combining several captures?
I can provide a shared drive if easier to share the project.
Regards,
Jon
Hi Jon,
I will gladly share anything appropriate.
The settings used in PIX4Dmatic are to find in the attached report.
Paviljong_2023-05-24-quality_report.pdf (22.8 KB)
–
regards
Tibor
Hi Tibor,
Thanks for sharing, I will send a link to a shared drive for you in PM. I see the quality report includes just ~500 images, so please include as many projects that are needed to reach the 1700. This will help me determine whether there could be anything in capturing that could assist for future, if MTPs could help, or even removal of photos from processing.
From your model I see that some points of vegitation through the pillars is getting represented innacurately(or at least appears so). I see you have the noise filter, but not the sky, and would recommend adding the sky filter as I do see sky, and that can help remove erroneous points around solid features.
I suspect the mottled direct light might not be helping, especially if there is a breeze causing movement. If looking for points to improve, capturing under less extreme lighting conditions could help. I understand this can be out of ones control, and too late for this model, but still worth concidering for the future.
Regards,
Jon
Hi Jonathan !
I have uploaded everything that came out of Catch.
I have reprocessed the project with a ROI and added 13 MTPs (255 marks).
The mesh is published here.
Quality rapport is attached to this e-mail.
Paviljong_2023-05-26-quality_report.pdf (26.4 KB)
Dear Tibor,
Thank you for reaching out and sharing the requested data.
After analyzing the project, we come up with the following: this is an excellent project to test and learn the Pix4Dcatch and viDoc as a 3D measurement solution. This dataset shows the importance of the quality of captured data. To have a well-textured and geometrically correct (with expected accuracy) mesh, we need to have a solid foundation, and this will be provided by a well-designed data acquisition. During analysis, we identified the followings:
- You have captured the data in different segments, using the pause button on the interface of the Pix4Dcatch. As processing relies on the overlap of subsequent images/frames; therefore we highly recommend continuing a scan as close as possible to the same position where the pause was initiated. Or maintain a consistent capture without using the pause button in this way.
- Your images have varying Ground Sampling Distances (GSD, footprint size of a single pixel on the object). We always recommend maintaining the same GSD during capturing, as this will enable a more constant density of 3D points and smoother texture on the mesh surface. In this case, it’s tough to align with that idea and capture a good dataset, but I believe with that goal in mind, you can capture much better images. In case you want to capture small details, there is an option of capturing different projects with different GSDs, processing them separately, and then merging projects in Pix4Dmatic.
- The object itself has central symmetry, and therefore it has parts that look the same, therefore it’s very easy to get lost in between them and mix up everything. In such cases, it’s always better to gather images with a larger view (capturing objects from further). This helps to avoid disambiguity. Another way to reduce the effect of repeated patterns is to have accurate position and orientation information for each captured image.
- There are many surrounding trees, which reduces the location accuracy of captured images. Even by using viDoc, you cannot achieve the required accuracy at a location where you have many trees, buildings, roofs of the pavilion, etc. We highly recommend having RTK fix status at least at the first and the last position of the capturing. Still, significantly better results are expected with the continuous fix status of the GNSS solution.
- Your fingers are visible in many of the images. This is definitely a thing that should be avoided during capturing. By this, you lose useable regions of images and therefore loos valuable information.
To conclude, we can say that the coexistence of many minor things ended with these results. In my point of view, it doesn’t worth to dig deeper into processing as only limited improvements may expect. I’m curious about what happens if you do a new capture of this object in respect of the above-explained ideas.
Regards,
Bence
Hallo and thank you for your advices.
-
I did use the pause button on the interface of the Pix4Dcatch but only at the start and at the end of the straight line scans.
I tried to keep the direction of shooting the same through the line.
That was a misinterpretation of your suggestion on the support page:
“Do not change the orientation of the camera while standing still. e.g. turn in place.”
-
On GSD: I see that the images taken by the iPhone 14 Pro have the size about 1,3 MB.
I have expected that the default size to be much larger.
The GSD changes thought the capturing because I did not circled the object.
-
“to have accurate position and orientation information for each captured image”
I used viDoc and I believe that for the most part the receiver indicated fix.
-
The background scenery is obviously a demanding task to handle for the software.
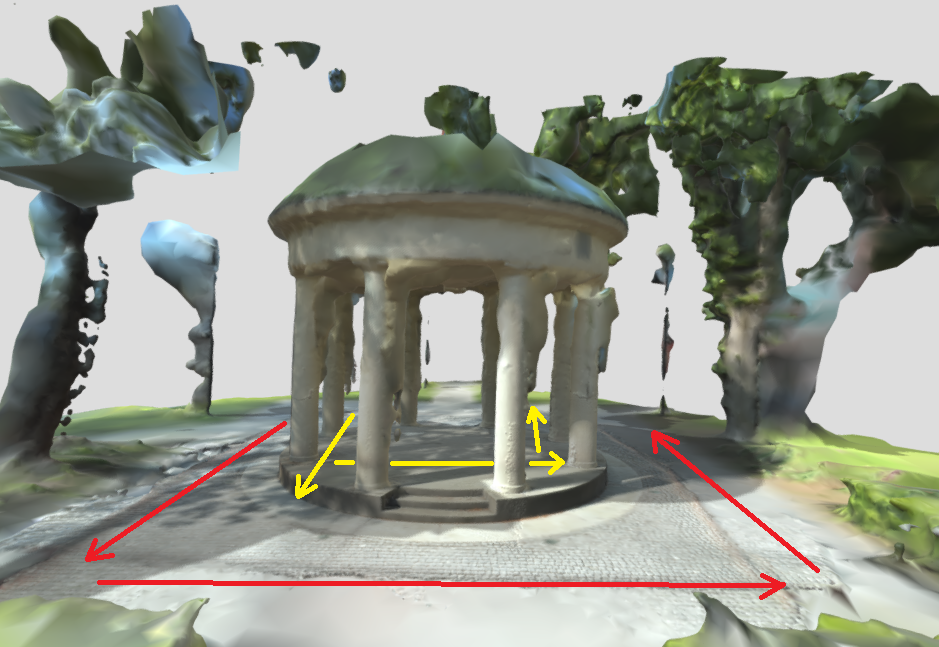
I gave a try and processed the project in Agisoft Metashape as well. I have never used it before, know nothing about it
and although I did not applied masks, the mesh shows none of the background trees, bushes and buildings.
The image above is from the mesh produced in Metashape, se https://skfb.ly/oHS8Z
Dear Tibor,
Thank you for your response.
If it is very difficult to maintain the GSD during capturing, we highly recommend to capture in different projects, process them separately and then merge it in PIX4Dmapper or PIX4Dmatic. This will allow the followings:
- Have the same GSD within a sub-project and achieve a highest accuracy.
- Have a detailed texture on the final generated mesh.
- Bypass the need of pausing capturing.
- Better control on the segments. You can correct the alignment of sections manually or with MTPs, even avoiding ghost surfaces.
Merge Projects - PIX4Dmatic
Regards,
Bence
Hello again !
I have collected images again and the result is satisfactory.
I choosed a day with overcast to get uniform lighting conditions.
For best result I recorded the scene in four equal parts and those were merged together later.
I did derive several GCP’s from the strongest parts of the modell with pix4Dsurvey to support the weaker parts trough several iteration.
Because the object itself has central symmetry the pillars got uniqe markings to avoid ambiguity and confusion. They came very handy while placing MTP’s.
Note to myself:
- it is better to re-take the parts without RTK fix status than to mend the weaknesses later
- measure GCP’s, viDoc is capable for that
See in Sketchfab: Paviljong_MERGE__1-8 - 3D model by tbg-tva [412db0f] - Sketchfab
See in pix4Dcloud: PIX4Dcloud
Dear Tibor,
I’m happy to hear that you achieved to capture a way better model.
Regards,
Bence