-While working with 3 cameras the project will be bad, and return orange cameras sometime
What are the orange cameras?
Orange cameras represent “uncalibrated” cameras, i.e. cameras that failed to calibrate in the calibration step.
-After loading GCPs and run the first step “Calibrate” the gcps are returning “outliter detected” what does that mean
Outliers are marks that are detected as not being at the right spot. I made an extensive reply on that topic here: Marks outlier detected for GCP tie points - #2 by Pierangelo_Rothenbuhler which I’d recommend to read.
-Using Nadir and just 1 camera (middle camera) with 400 images works fine while 5000 images will be garbage.
In the first screenshot you shared, I see that you have used the “Model” template for calibration, this is not meant for corridor mapping, so for that one it is not surprising that it makes bad results, as corridor mapping is a tricky calibration problem. However, I am surprised that the “Large scale and corridor” template creates a similar issue. Have you started the project from scratch with the “large scale and corridor” calibration template?
If you trust the internal camera parameters of your camera, something to try would be to set “Internals confidence” to “High”. This should limit the optimization of the internal parameters and might decrease the drift you have.
Can you tell me more about the camera model and resolution you have used? In the screenshot I seem to see that the resolution is 12MP (4000*3000) but I am not sure I saw it correctly. If it is the latter, then the resolution is rather small and might require more overlap.
What frontal overlap do you have between your images? I assume there is a single flight line.
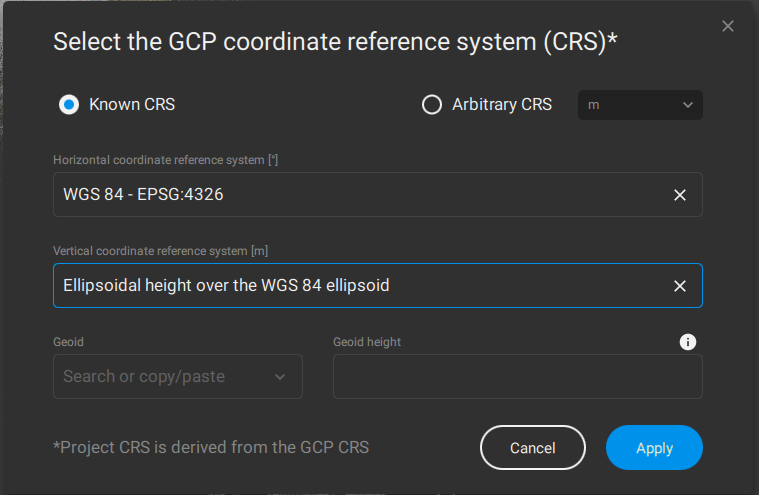
-coordinates system of the images WGS 84/UTM zone 18N Epsg:32618/ While uploading the GCPs I am using as Horizontal coordinates: WGS 84 EPSG:4326, is that right or I should choose something
else, knowing that I tried using WGS 84/UTM zone 18N Epsg:32618 and it didn’t work
Well, in what coordinate reference system were the GCPs measured? It’s hard to know as it depends on the settings of the hardware that was used to acquire the GCPs. This should be something that is known and that should be set accordingly in PIX4Dmatic. If it was measured in the geographic CRS WGS 84, then EPSG:4326 is correct, here is how that would usually look like:
-Our goal is to be able to work up to 50,000 images , I am studying long corridors it would work on pix4dmapper but takes too long , after some research done and time to upload images on matic was much faster.I am looking to finding a solution for my project concerning matic.
At the moment, we have a limitation in the project format that limits the size of a project to about 12’000 to 15’000, but we are soon going to rework that format so that the only (theoretical) limit is the hardware on which you run the processing. In the meantime, splitting projects into 10k - 15k sets should make it work.
Looking forward to getting more info!
Thanks!