Hello Team, I am currently processing a project in which we had 3 different flight missions. Flown at a 75 overlap at 200’ AGL. We are currently using a Zenmuse P1 35mm and M300 w RTK. I have tried processing the 2600+ images all at once, and as you would expect this created multiple blocks within the data. We have 5 GCPs across the project and I am looking for some direction in trying to solve these processing issues.
Processing Options
General - 1/2 Image Scale
Matching - Aerial without G.V.M.
Calibration - Auto, Standard, Internal Camera Parameters set to All Prior, Rematch Auto
My current process is separating the individual flight missions and processing them separately. Adding MTPs between project and in the process of attempting to merge them. That’s when I noticed however even one of 2 of the flights are creating multiple blocks as well. My understanding is that this was just poor data collection, probably could have used a higher overlap as well as consistent flight times. Or could this be an issue with the P1 and camera? Any help, information, or knowledge would be appreciated.
Trying to map areas with heavy vegetation is challenging. It has a complex geometry that can move in the wind. As a result, it makes for a challenging environment. In these areas, you will want to have a very high overlap. Probably between 80-90% front and side.
You can also drop the image scale in step 1 down to 1/4. This tends to reduce the amount of noise caused by the veg and will help with the calibration. Give this a shot.
I would also change your calibration method to Alternative. This is designed for agricultural applications but works well in vegetation. You can also try the Accurate Geolocation and Orientation as well.
Hello, i also have 3 blocks showing up on a beach survey recently completed. I cannot locate these different blocks to try fix. Can someone assist on how to identify where the 3 blocks are?
It is creating multiple height layers in a particular area of the survey.
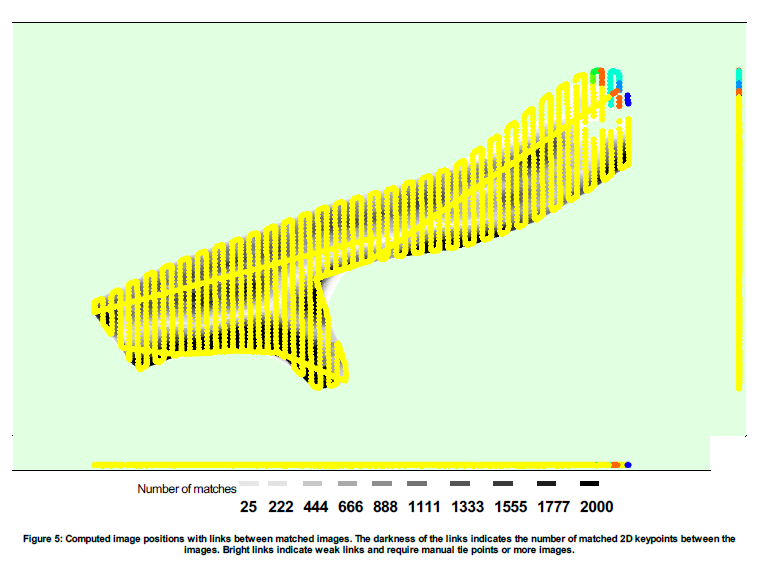
The quality report looks very good. The presence of three blocks may seem concerning, but it’s a bit misleading. The screenshot below highlights their locations:
The yellow block represents a single, continuous area that covers the majority of your project.
The red and green blocks are small, isolated sections near the water.
Thanks Mike, does this mean that multiple blocks (if in a small area like the above or below image example) are not impacting overall accuracy? I below job has 7 blocks. Id prefer to remove them, but wont worry if not a big deal. As i understand these blocks are created over areas of water where stichting has trouble.
These cookies are necessary for the website to function and cannot be switched off in our systems.
They are usually only set in response to actions made by you which amount to a request for services, such as setting your privacy preferences,
logging in, or filling in forms. These cookies do not store any personally identifiable information.
These cookies allow us to count visits and traffic sources so we can measure and improve the performance of our site.
They help us to know which pages are the most and least popular and see how visitors move around the site.
All information these cookies collect is aggregated and therefore anonymous.
If you do not allow these cookies we will not know when you have visited our site, and will not be able to monitor its performance.
These cookies may be set through our site by our advertising partner (Google).
They may be used by Google to build a profile of your interests and show you relevant adverts on other sites.
They do not directly store personal information but are based on uniquely identifying your browser and internet device.
If you do not allow these cookies, you will experience less targeted advertising.