Hi,
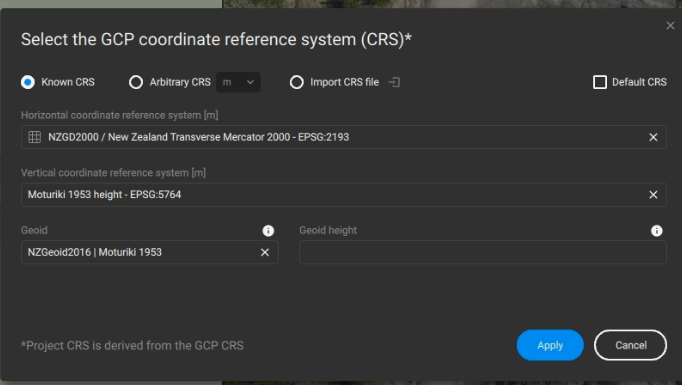
I have processed my drone data which was recorded in NZVD2016 and have chosen the GCP coordinate reference system as below however my model is processing fine but when looking at the outputs the elevation is about 25 m above where it is meant to be.
I have even added 3 ground control points and marked these but when looking in 3D the ground control points are located way below the model processed from the drone data.
The drone is an RTK and I have used the Whakatāne RTK when flying the drone.
Has anyone had a similar problem before and know how to resolve it? Thanks!