I am trying to merge two projects, I was following the steps from the online guide. I created manual tie points and made sure that the So^2 value was under 1 pixel but it still shows that there is very high error in the z - axis. I attached the quality report below.
Hi hadenapenrod,
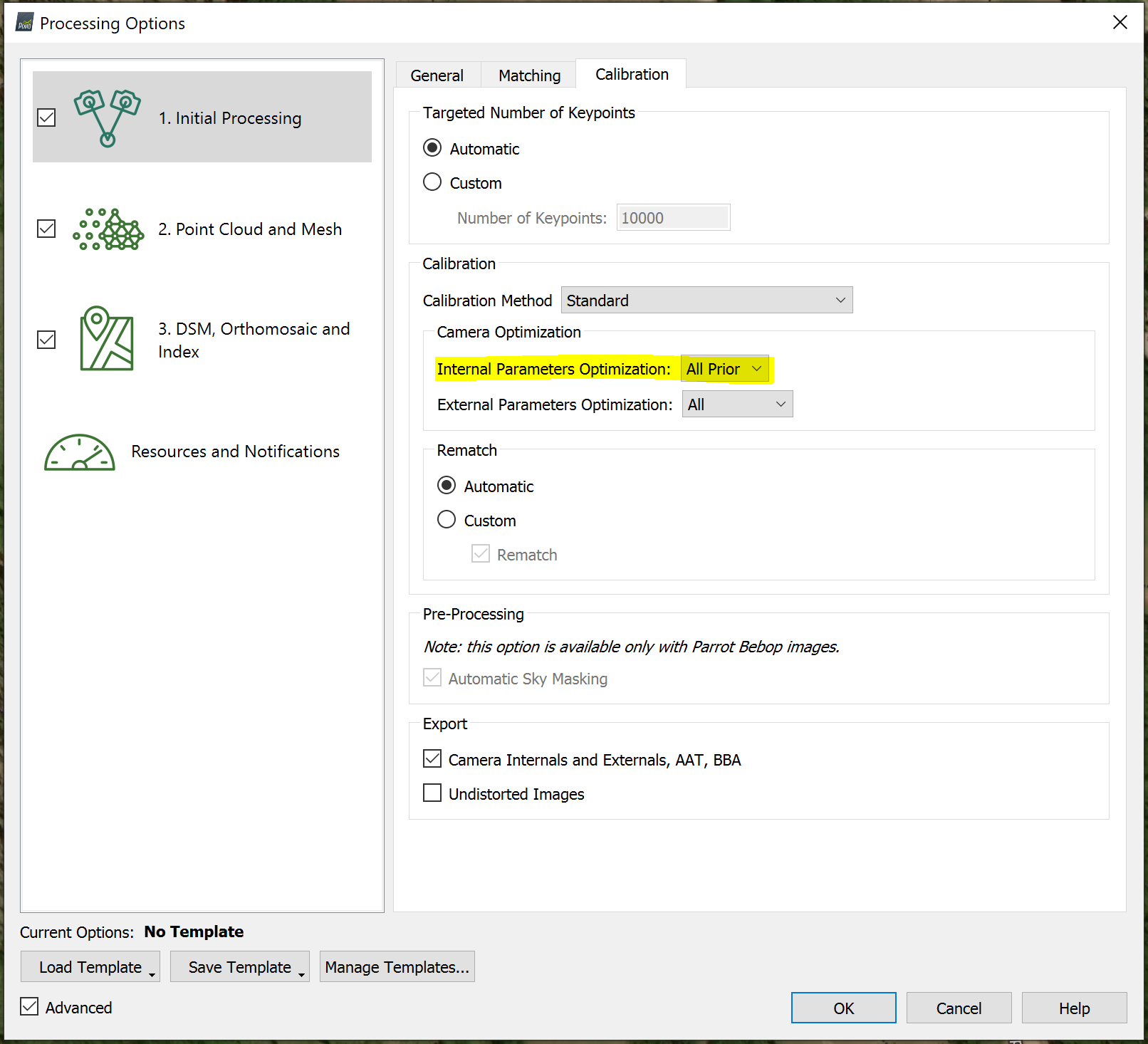
I see a couple areas that could be improved. First, you have a high camera optimization error. Anything above 5% I would suggest enabling All Prior under step 1.
The other item has to do with how you mark your MTPs. You made reference to this but it could be improved. I would suggest only marking 10-15 of the best images. Make sure the points you are marking are at the center of the image and zoom in as far as you can. As you said, you will want to keep the So^2 value under 1 pixel. If you use blurry images or the points are at the edge of an image then this value will increase. That should help merge your projects together.
Hi Mike_K,
Thank you for your response! I tried your suggestions and they worked great in reducing the camera optimization error. I updated the MTPs, some were very off so I reduced the number of them.
For some reason the y error decreased but is still quite high.
Hi ellis,
The geolocation has to do with the location of the images. Mapper will compare what the geolocation is on the exif to where it computes its location. Due to low grade GPS units on the drone it is difficult to rely on this data. It doesn’t give you a very good idea of the accuracy of your project. If you could add some GCPs then we can understand if the model isn’t fitting very well.
We - and our partners - use cookies to deliver our services. By using our website, you agree to the use of cookies as described in our
Cookie Policy
These cookies are necessary for the website to function and cannot be switched off in our systems.
They are usually only set in response to actions made by you which amount to a request for services, such as setting your privacy preferences,
logging in, or filling in forms. These cookies do not store any personally identifiable information.
These cookies allow us to count visits and traffic sources so we can measure and improve the performance of our site.
They help us to know which pages are the most and least popular and see how visitors move around the site.
All information these cookies collect is aggregated and therefore anonymous.
If you do not allow these cookies we will not know when you have visited our site, and will not be able to monitor its performance.
These cookies may be set through our site by our advertising partner (Google).
They may be used by Google to build a profile of your interests and show you relevant adverts on other sites.
They do not directly store personal information but are based on uniquely identifying your browser and internet device.
If you do not allow these cookies, you will experience less targeted advertising.