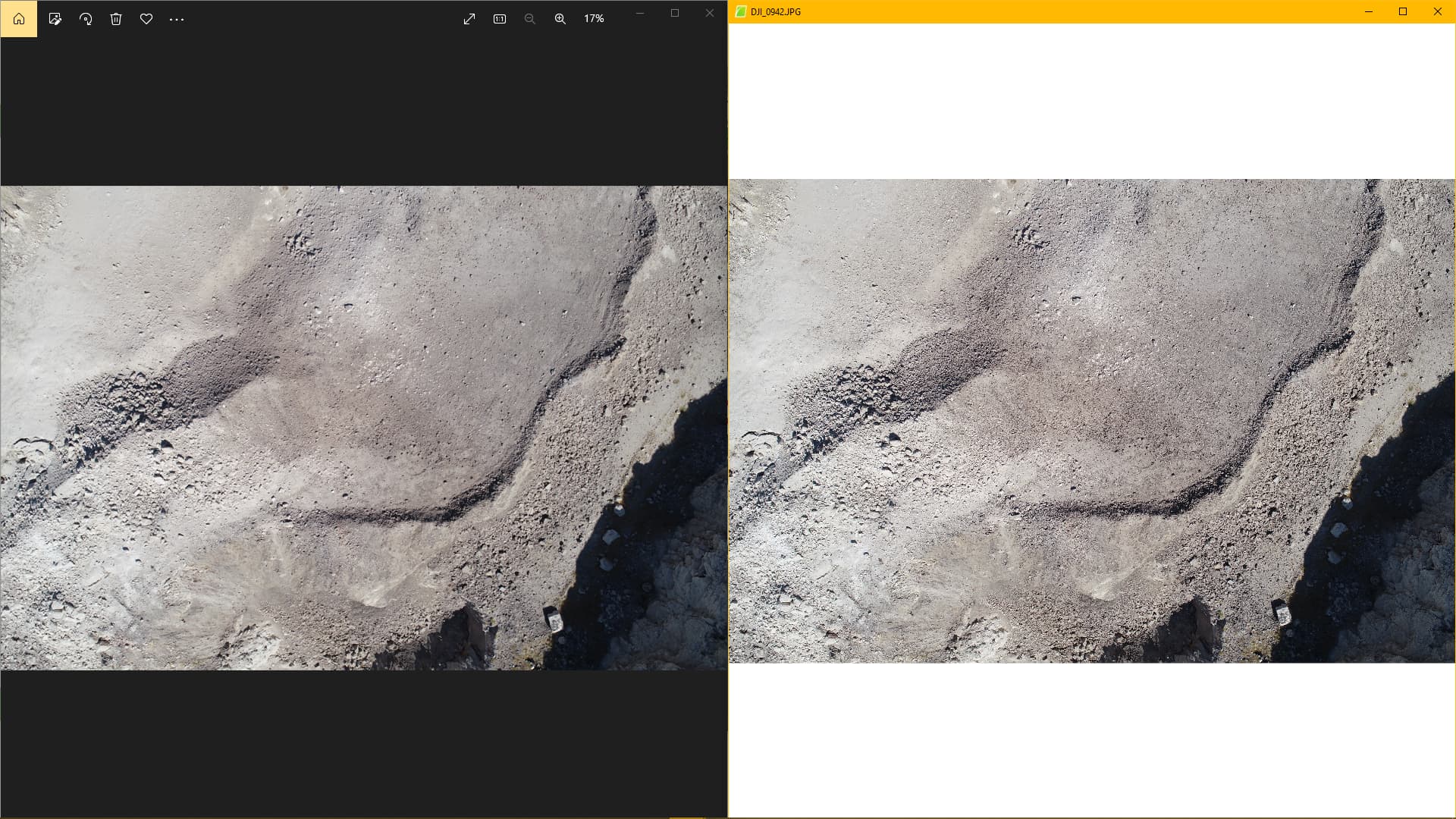
Good day, I am currently doing a research project whereby I aim to evaluate and account for mapping product (DEM, DTM and Orthoimage) accuracy and precision (Relative and absolute) based on 3 datasets collected using 1. No Terrain following, 2. Using Terrain following and 3. Using 2 staggered flights at constant altitudes. A key factor was to use a site with a steep slope to force a difference in the quality of collected data and see which approach will yield the best results. i.e. this site has a elevation difference of 60 metres between top and bottom.
I used Map pilot pro to do flight planning and based on the GSD provided here for each mission I planned to compare the GCP and CP sigma and RMSE of the different flight expecting the project with a constant GSD to produce the best results overall.
The flight plan parameters are as follows using a Phantom 4 Pro V2:
- 53m Altitude at takeoff position for a GSD of 1.5cm/pixel
- 80% Forward and Sidelap
- UAV speed of 4.2m/s
- Normal Aligned mission

The site consists of GCPs spread out at about 50m grid intervals and CPs between each GCP formed polygon. All points were surveyed using RTK-GNSS within 20mm precision before applying a confidence interval however, in this example I used the default 20mm)

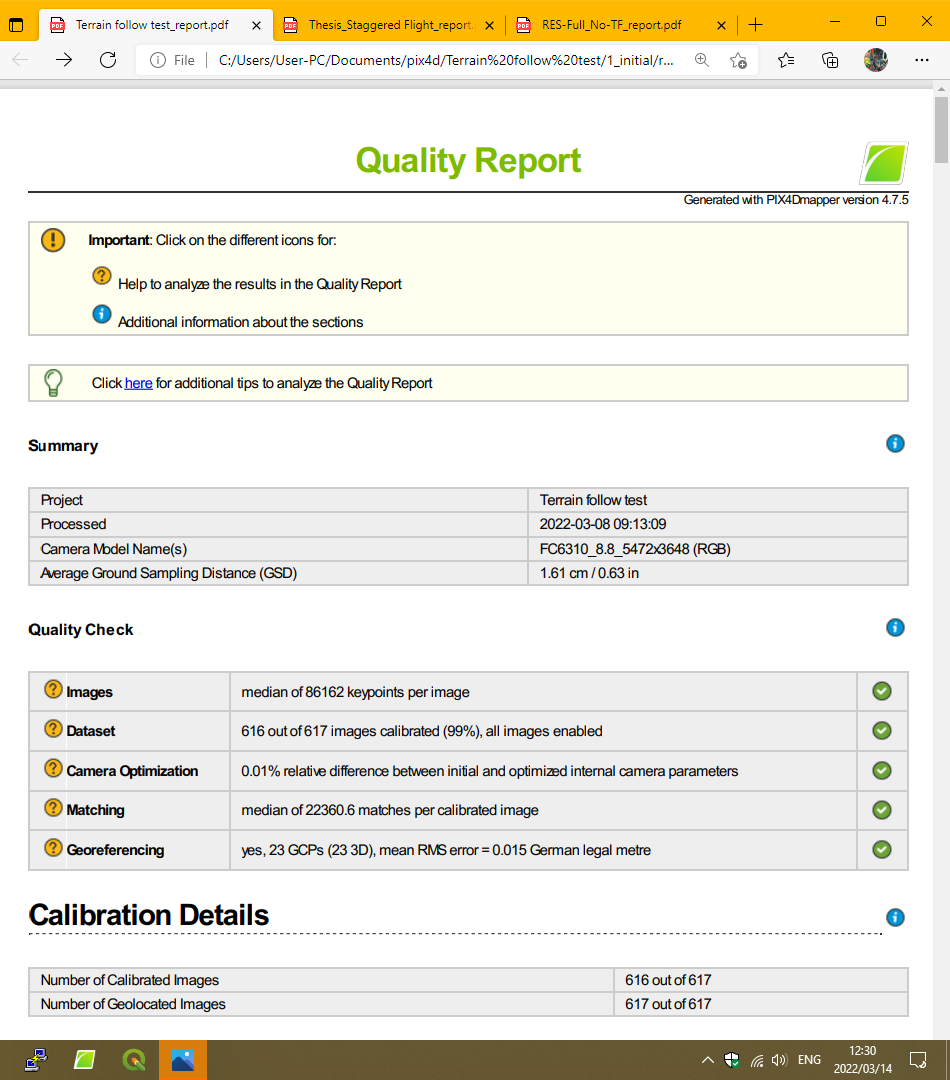
Here are the quality checks for each project:
- Terrain Follow: Note, a flight line was missed and replaced with a constant altitude flight line, I tested with and without it and the difference was negligible IMO.


-
Constant Altitude:
-
Staggered:


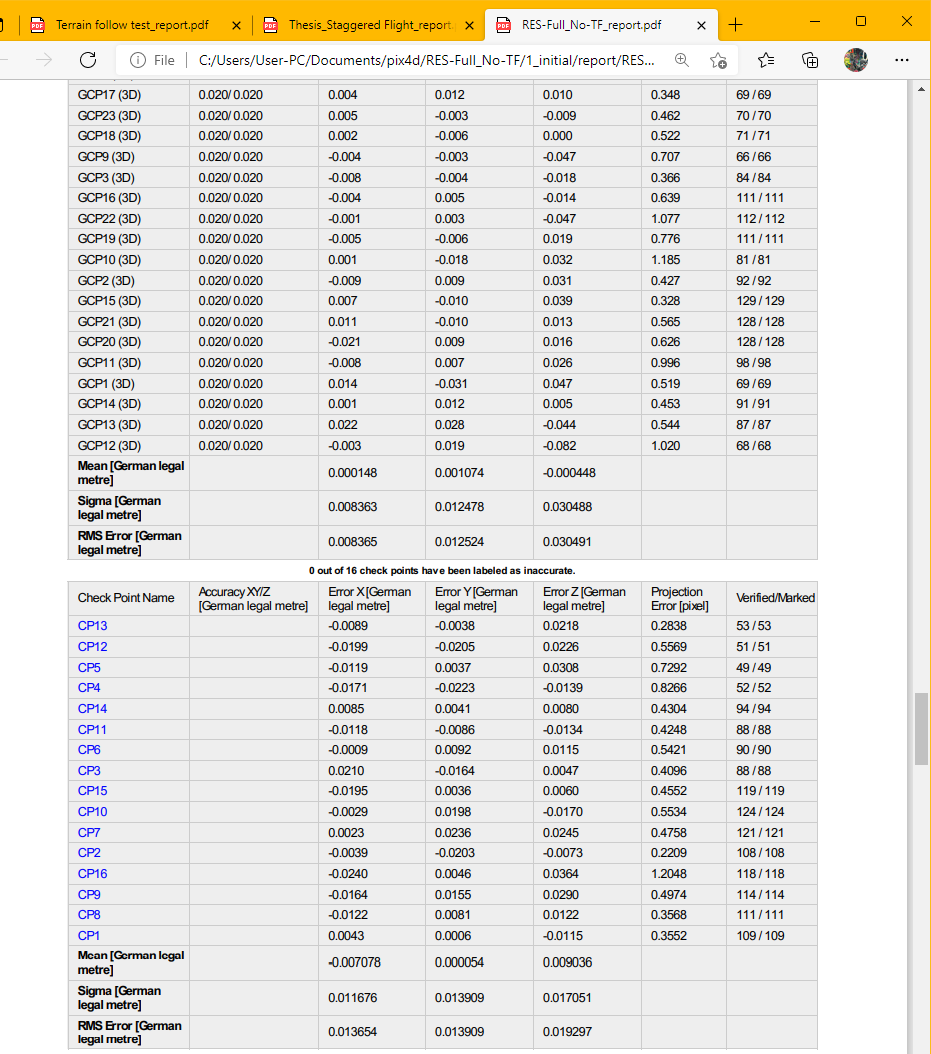

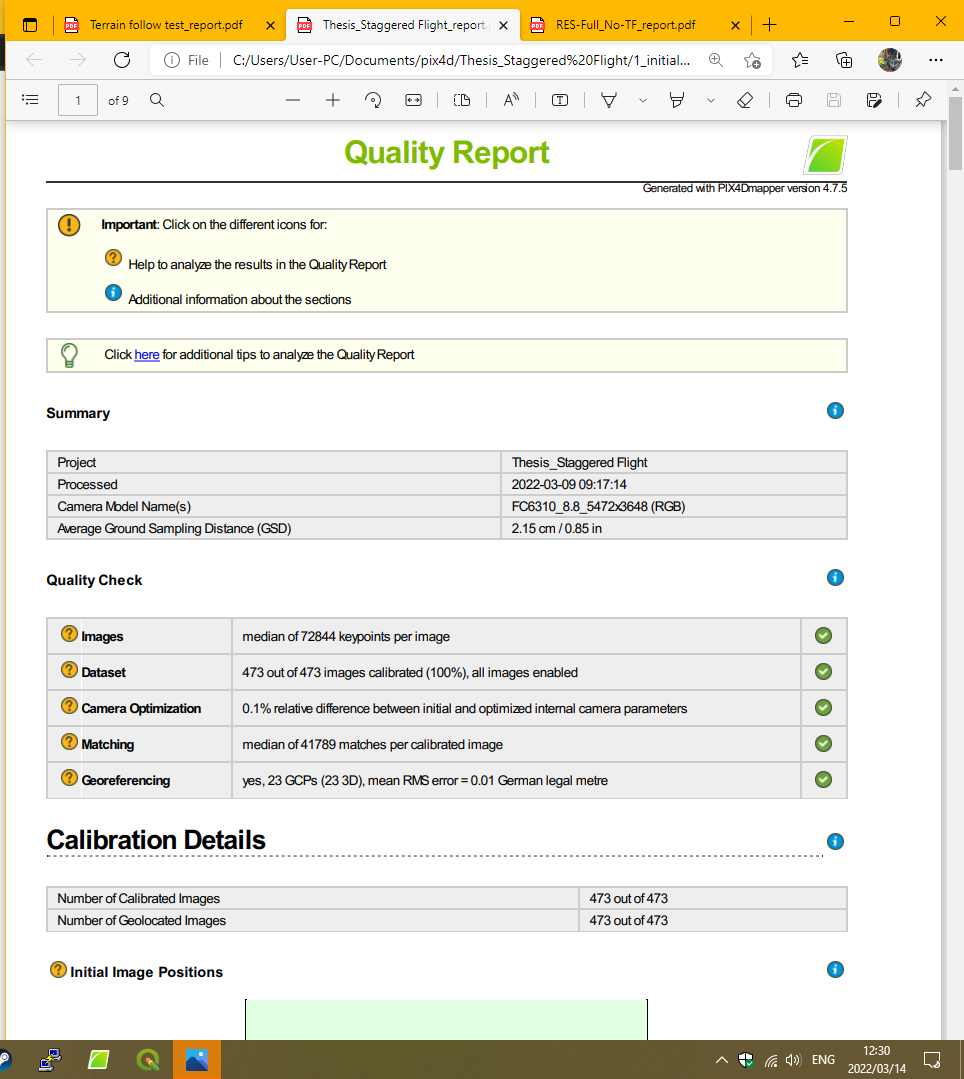

What I currently don’t understand is how the GCP and CP sigma and RMS can be better than the expected precision and accuracy stipulated by PIX4D based on the average GSD for a project. i.e. 1-2 times planimetric and 2-3 times altimetric. Furthermore, one would expect the terrain follow mission to yield the best results and secondly the staggered flight if I’m not mistaken but the results show otherwise.
How would you establish the final relative and absolute accuracies and precisions of all 3 surveys to then compare the results and establish the reasoning for the variation?
E.g. Are the CP results for say the constant altitude flight better than the terrain follow one because the control and tiepoints are matched in significantly more images due to the elevation change?
I know there are explanations available online but I’m struggling to come to a conclusion when establishing what exactly the GCP sigma and RMSE represents in PIX4D? Is it the relative precision and accuracy of the control network? and then the CP sigma and RMSE relate to the absolute accuracy of the model when evaluated against the GCPs?
Moreover, I was having issues when trying to process the flights when I use the ‘as-staked’ precision of the GCPs which were all between 6-17mm. After initial processing the GCPs are added and marked and when I reoptimize the point cloud disappeared.
Also, is it safe to assume that the ‘Theoretical accuracy’ at a tiepoint or GCP/Checkpoint states the relative precision of the point when a ‘free-net adjustment’ is performed?
Lastly, how does the amount of initial 2d matches and 3d densified tiepoints in the dense cloud affect the model accuracy and precision?
Best Regards
Francois